产品型号:
多功能辐射监测机器人系统系统简介多功能辐射监测机器人系统用于辐射境中对地面的α、β、γ放射性测量和分析,亦可用于 核
产品中心
Product Center



多功能辐射监测机器人系统
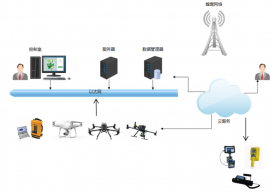
系统简介多功能辐射监测机器人系统用于辐射境中对地面的α、β、γ放射性测量和分析,亦可用于 核事故和核恐怖袭击后精确、快速的分析现场地面α、β、γ放射性强度。同时,也可以应用于II类放射源遗失搜寻找回作业,先用无人机搜寻,确定放射源大概位置;再操作失控放射源寻源作业机器人到达操作指定区域,准确定位放射源位置,利用机械臂将放射源抓取后,放入跟随的运输机器人的源罐中,运离现场。
应用领域
- 工业应用:仓库和车间之内(或之间)物品自动寻找、装载和搬运
- 应急处理:在核电站、化工厂等危险环境中对放射性、污染或有毒物品进行搬离和清理等处置
- 抢险救灾:在地震、核泄漏、化学爆炸、矿难等场合寻找失踪人员(生命特征),抢救伤员
- 社会安全:在公共场合进行巡逻、监控,对恐怖分子进行攻击(例如喷射水枪),对炸弹和毒液进行处置
- 消防:靠近火灾场景,发射水炮或操作消防水枪
- 采矿:对煤矿和有色金属的矿井进行安全巡检,运送给养等
产品特征
- 基于用户设定的测量参数(如测量时间、探测器设置等),探测机器人实现对地面的自动巡逻测量,并生成测试结果和测量报告
- 探测机器人采用北斗或GPS信息,标识地面坐标信息 ,通过检测地面放射性强度,对地面的检测过程进行全过程记录和地面辐射信息索引。
- 探测机器人具备地面信息管理功能,能够记录地面的基本信息(如采样时间、地 点 、 辐射强度等),以及地面的测量信息(包括测量结果、测量报告等),并提供地面信息的回看、查询和统计功能。
- 探测机器人的控指系统和辐射探测系统相对独立,辐射探测系统具有数据本地存储、查询、动态显示和加密功能。
- 探测机器人依据操控指令可沿规划路径前进、后退、左右转向、原地 360°旋转、规避障碍和爬楼梯。
作业机器人
- 最大爬坡角度:30°;
- 行走机构:履带式;
- 最大速度:0.5m/s;
- 视觉感知:3路摄像头;
- 耐辐射总剂量:1000Gy;
- 耐辐射瞬时剂量率:40Gy/h
核素识别探测器模块
- 探头:F2’’´2”Nal;
- 相对能量分辨率:£ 7.0% @662KeV;
- 能量响应范围:30KeV~3MeV;
- 变换增益:1024道;
- 放射性核素识别:满足IEC 62327-2006的要求;
γ剂量率探测器模块
- 剂量率测量范围:100μGy/h~1Gy/h
- 累计剂量范围:100μGy~10Gy;
- 能量范围:50keV~3MeV;
- 能量响应:≤30%;
- 角响应:≤20%(4元立体角);
- 响应时间:<5s;
- 测量误差:<15%;
表面污染监测模块
- 测量辐射类型:α/β
- 探测器类型:塑料闪烁体涂ZnS
- 探头最小测量面积:150mm×90mm
- 测量效率(2π,90Sr-90Y):≥45%
- 自然环境本底计数率β:≤5cps
系统软件平台
机器人系统软件平台可实时显示机器人所在的经纬度及挂载探测器的监测数据;可远程规划机器人行进轨迹;机器人操控平台中监控界面包括设置、导航定位、视频监控、历史数据、帮助等功能模块。其中导航定位模块可以实时显示机器人当前所处位置。
机器人一共有3路视频图像。它可以根据不同现场情况的需要来改变视频模式,一般前视图像为安装在云台上的摄像头,起关键作用,它可以全方位地观察周围环境,使机器人有一个安全的操作空间,使操作更为方便可靠;后视摄像头,在机器人倒退过程中,能清楚的观察到地面以及后方道路情况。
历史数据功能主要为了实现对机器人模拟演练或实际作业过程中的历史数据进行调阅、导出。包括视频录像、视频截图、温湿度数据记录、辐射剂量探测信息记录数据等。



 400-178-2818
400-178-2818